저번 포스팅이 너무 길어져 2개로 나누었다.
일단 다음과 같이 세팅을 해주자
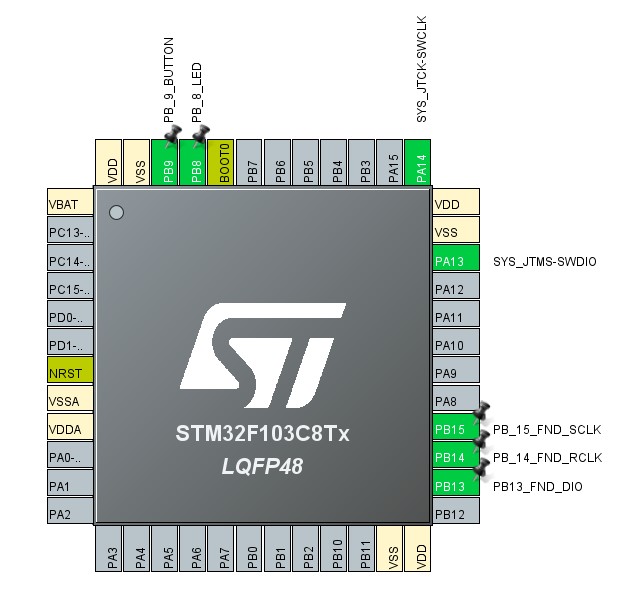
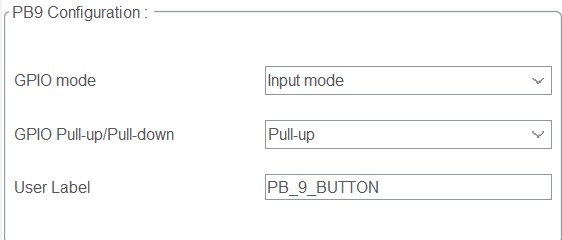
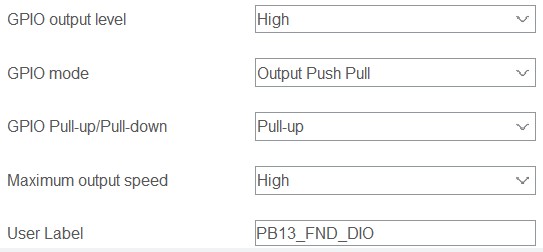
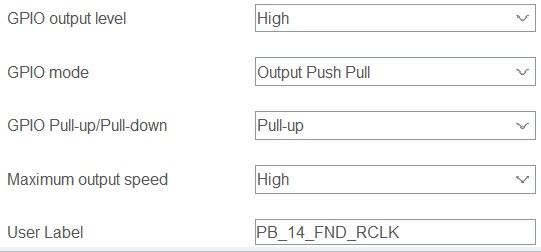
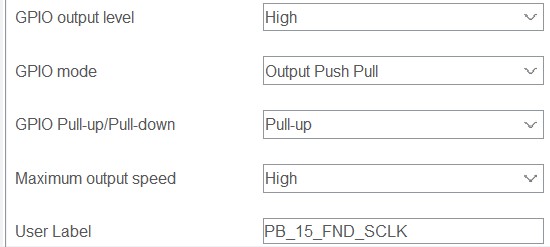
위와 같이 설정을 하고 코드를 입력하여 진행한다.
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define HIGH 1
#define LOW 0
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void send(uint8_t X);
void send_port(uint8_t X, uint8_t port);
void display_number(int number, int repetitions);
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
//counter
int Index = 0;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
static uint8_t lastState = LOW;
uint8_t currentState = HAL_GPIO_ReadPin(GPIOB, PB_9_BUTTON_Pin);
if (currentState == HIGH && lastState == LOW) {
// 버튼이 눌린 순간
if(Index > 10000) {
Index = 0;
} else {
++Index;
}
display_number(Index, 50, numCheckPosition);
}
display_number(Index, 50, numCheckPosition);
lastState = currentState;
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, PB13_FND_DIO_Pin|PB_14_FND_RCLK_Pin|PB_15_FND_SCLK_Pin, GPIO_PIN_SET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(PB_8_LED_GPIO_Port, PB_8_LED_Pin, GPIO_PIN_RESET);
/*Configure GPIO pins : PB13_FND_DIO_Pin PB_14_FND_RCLK_Pin PB_15_FND_SCLK_Pin */
GPIO_InitStruct.Pin = PB13_FND_DIO_Pin|PB_14_FND_RCLK_Pin|PB_15_FND_SCLK_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PB_8_LED_Pin */
GPIO_InitStruct.Pin = PB_8_LED_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(PB_8_LED_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : PB_9_BUTTON_Pin */
GPIO_InitStruct.Pin = PB_9_BUTTON_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(PB_9_BUTTON_GPIO_Port, &GPIO_InitStruct);
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
void send(uint8_t X){
for (int i = 8; i >= 1; i--)
{
if (X & 0x80)
{
HAL_GPIO_WritePin(PB13_FND_DIO_GPIO_Port, PB13_FND_DIO_Pin, HIGH);
}
else
{
HAL_GPIO_WritePin(PB13_FND_DIO_GPIO_Port, PB13_FND_DIO_Pin, LOW);
}
X <<= 1;
// make CLK
HAL_GPIO_WritePin(PB_15_FND_SCLK_GPIO_Port, PB_15_FND_SCLK_Pin, LOW);
HAL_GPIO_WritePin(PB_15_FND_SCLK_GPIO_Port, PB_15_FND_SCLK_Pin, HIGH);
}
}
void send_port(uint8_t X, uint8_t port){
send(X);
send(port);
HAL_GPIO_WritePin(PB_14_FND_RCLK_GPIO_Port, PB_14_FND_RCLK_Pin, LOW);
HAL_GPIO_WritePin(PB_14_FND_RCLK_GPIO_Port, PB_14_FND_RCLK_Pin, HIGH);
}
void display_number(int number, int repetitions) {
int n1, n2, n3, n4;
// 0~9
uint8_t numArr[10] = {0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8 ,0x80,0x90};
// num_position
uint8_t numPosition[4] = {0b0001, 0b0010, 0b0100, 0b1000};
// 각 자릿수 분리
n1 = number % 10; // 1의 자리
n2 = (number / 10) % 10; // 10의 자리
n3 = (number / 100) % 10; // 100의 자리
n4 = (number / 1000) % 10; // 1000의 자리
for(int i = 0; i < repetitions; i++) {
send_port(numArr[n1], numPosition[0]); // 1의 자리
send_port(numArr[n2], numPosition[1]); // 10의 자리
send_port(numArr[n3], numPosition[2]); // 100의 자리
send_port(numArr[n4], numPosition[3]); // 1000의 자리
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
중요한 부분은 다음과 같다.
void display_number(int number, int repetitions) {
int n1, n2, n3, n4;
// 0~9
uint8_t numArr[10] = {0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8 ,0x80,0x90};
// num_position
uint8_t numPosition[4] = {0b0001, 0b0010, 0b0100, 0b1000};
// 각 자릿수 분리
n1 = number % 10; // 1의 자리
n2 = (number / 10) % 10; // 10의 자리
n3 = (number / 100) % 10; // 100의 자리
n4 = (number / 1000) % 10; // 1000의 자리
for(int i = 0; i < repetitions; i++) {
send_port(numArr[n1], numPosition[0]); // 1의 자리
send_port(numArr[n2], numPosition[1]); // 10의 자리
send_port(numArr[n3], numPosition[2]); // 100의 자리
send_port(numArr[n4], numPosition[3]); // 1000의 자리
}
}
처음엔 다음과 같이 간단하게 코드를 구현했다.
if (Index < 10) {
send_port(numArr[Index], numPosition[0]); // 1's place
} else if (Index < 100) {
for (int i = 0; i < 50; i++) {
send_port(numArr[Index % 10], numPosition[0]); // 1's place
send_port(numArr[(Index / 10) % 10], numPosition[1]); // 10's place
}
} else if (Index < 1000) {
for (int i = 0; i < 50; i++) {
send_port(numArr[Index % 10], numPosition[0]); // 1's place
send_port(numArr[(Index / 10) % 10], numPosition[1]); // 10's place
send_port(numArr[(Index / 100) % 10], numPosition[2]); // 100's place
}
} else if (Index < 10000) {
for (int i = 0; i < 50; i++) {
send_port(numArr[Index % 10], numPosition[0]); // 1's place
send_port(numArr[(Index / 10) % 10], numPosition[1]); // 10's place
send_port(numArr[(Index / 100) % 10], numPosition[2]); // 100's place
send_port(numArr[(Index / 1000) % 10], numPosition[3]); // 1000's place
}
} else {
Index = 0; // Reset the index
}
하지만 문제점이 발생했다.
높은 자릿수만 나타나고 뒤의 숫자들은 빠르게 깜박이고 사라지는 현상이 발생했다.
처음엔 7세그먼트 문제인줄알았는데, 다른 모듈로 바꿔도 상황은 같았다.
그래서 코드 문제라고 생각했다.
너무 빨리 지나가서 그런가? 해서 각 자릿수에 빠르게 50번 돌려보면 되겠다. 라고 생각했고,
방법은 틀렸다.
위 코드는 50번 돌리는 것을 적용한 것이다.
그래서 다음으로 " 그럼 딜레이를 줘보자" 라는 생각으로 각각의 자릿수에 딜레이를 주었다.
if(HAL_GPIO_ReadPin(GPIOB, PB_9_BUTTON_Pin) == HIGH){
continue;
}else {
if (Index < 10) {
send_port(numArr[Index], numPosition[0]); // 1's place
} else if (Index < 100) {
for (int i = 0; i < 50; i++) {
send_port(numArr[Index % 10], numPosition[0]); // 1's place
HAL_Delay(2);
send_port(numArr[(Index / 10) % 10], numPosition[1]); // 10's place
HAL_Delay(2);
}
} else if (Index < 1000) {
for (int i = 0; i < 50; i++) {
send_port(numArr[Index % 10], numPosition[0]); // 1's place
HAL_Delay(2);
send_port(numArr[(Index / 10) % 10], numPosition[1]); // 10's place
HAL_Delay(2);
send_port(numArr[(Index / 100) % 10], numPosition[2]); // 100's place
HAL_Delay(2);
}
} else if (Index < 10000) {
for (int i = 0; i < 50; i++) {
send_port(numArr[Index % 10], numPosition[0]); // 1's place
HAL_Delay(2);
send_port(numArr[(Index / 10) % 10], numPosition[1]); // 10's place
HAL_Delay(2);
send_port(numArr[(Index / 100) % 10], numPosition[2]); // 100's place
HAL_Delay(2);
send_port(numArr[(Index / 1000) % 10], numPosition[3]); // 1000's place
HAL_Delay(2);
}
} else {
Index = 0; // Reset the index
}
++Index;
}
이것 또한 숫자가 조금더 오래 남아있지만 근본적인 해결 방법이 아니라는 것을 꺠달았다.
그러면서 코드를 유심히 보니, 버튼을 누르지 않을 땐 그냥 지나가게만 두었다..
이렇게 생각하니 간단하게 실험만 해볼 코드로는 안될것 같았다.
원인은 버튼을 누르지 않았을 때 LED를 표현하지 않아서 뒤에 숫자 부분이 빠르게 표시되었다가, 사라진것이다.
아래 코드를 복사해서 if문 안에도 넣어주니 해결되었지만, 코드가 너무 복잡하다.
따리서 함수로 구현하였다.
그것이
// 함수부분
void display_number(int number, int repetitions) {
int n1, n2, n3, n4;
// 0~9
uint8_t numArr[10] = {0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8 ,0x80,0x90};
// num_position
uint8_t numPosition[4] = {0b0001, 0b0010, 0b0100, 0b1000};
// 각 자릿수 분리
n1 = number % 10; // 1의 자리
n2 = (number / 10) % 10; // 10의 자리
n3 = (number / 100) % 10; // 100의 자리
n4 = (number / 1000) % 10; // 1000의 자리
for(int i = 0; i < repetitions; i++) {
send_port(numArr[n1], numPosition[0]); // 1의 자리
send_port(numArr[n2], numPosition[1]); // 10의 자리
send_port(numArr[n3], numPosition[2]); // 100의 자리
send_port(numArr[n4], numPosition[3]); // 1000의 자리
}
}
이 부분이다.
적용해서 확인해보자
만약 앞에 0이 안나오게 하려면 조금 더 수정하면 될듯하다.
그건 본인이 원하는거에 맞게 수정하자
https://www.youtube.com/watch?v=H6uAf5l5KeE
'STM32' 카테고리의 다른 글
| STM32으로 Fan을 제어해보자 1) (0) | 2024.11.12 |
|---|---|
| 7세그먼트 코드 수정 (1) | 2024.11.10 |
| HAL_Driver로 7세그먼트와 Button 다루기 (3) | 2024.11.09 |
| GPIO를 사용하여 LED 제어 (1) | 2024.11.08 |
| STM32 Cube IDE Install (0) | 2024.11.04 |